配网架空输电线路无人机综合巡检技术
摘要:为满足配电网架空线路巡检应用需求,提出了基于小型无人直升机平台的配网架空线路综合巡检技术。提出无人机综合巡检平台的构建方法,研究确定无人机搭载的可见光、红外、紫外及超声波传感器、特高频传感器等综合巡检模块的配置要求。测试结果表明,无人机巡检系统的适应环境温度为–20~45 ℃,最高海拔高度为2 000 m,抗风能力为7 m/s;悬停控制精度的垂直方向为±0.5 m、水平方向为±1.0 m,能精确定点近距离巡检杆塔。对于可见光传感器,有效像素数为1 200万,具备变焦和自动对焦功能;对于红外传感器,有效像素数为30万,具备自动对焦功能。提出的小型无人直升机综合巡检技术可应用在配网架空线路巡视和检测,以提升配网线路巡检的自动化和智能化水平。
关键词:配网架空输电线路 无人机综合巡检 传感模块 环境适应性 巡检功能
本文转载自《中国电力》杂志 2018年 51卷 1期
引言
近年来,随着遥感、自动控制、信息处理、图像识别等新技术快速发展,无人机技术在铁路、交通物流、农业植保、石油化工等行业获得了广泛应用[1-2]。与此同时,电力行业也在不断探索无人机巡检技术研究和应用[3-6]。
国家电网公司自2011年开始探索“直升机、无人机和人工协同巡检”应用。2013年年初,在公司系统内选取10个省(地市级公司)开始为期3年的协同巡检试点应用工作。2016年至今,正在开展无人机巡检推广应用[7-8]。
总体而言,配电网设备运维效率和技术水平不足,配电网设备停电试验项目很少,日常巡视是主要的设备状态管控手段[9-10],运维人员对于有效且高效的巡检手段需求较为迫切。目前,搭载可见光、红外、紫外传感器等检测设备的无人机巡检系统已应用于主网输电线路设备本体、附属设施和通道环境巡视检查和检测工作。在配电网线路巡检方面,由于配电网设备和系统结构复杂、邻近人口密集用户区等影响因素制约,基于无人机巡检技术在配电网架空线路中的应用还未见相关报导。
1 无人机综合巡检平台构建
1.1 无人机选型
目前应用于电网巡检的无人机按照平台进行分类,主要包括固定翼无人机、大中小型无人直升机(多为电动多旋翼)。固定翼无人机具有飞行速度快(大多数在100~200 km/h)、续航时间较长、作业范围广等优势,缺点是无法进行定点悬停观测、照相,起降条件要求较高。目前成熟可靠的大、中型无人直升机产品较少,应用的比较多的是美国Copterworks公司生产的AF25b型直升机,该机动力为双缸汽油发动机,起飞质量32 kg,载荷11 kg,续航时间约1 h;相对于电动多旋翼无人机,该机优点是载荷大、续航时间长,缺点是维护操作较复杂且携带不方便。电动多旋翼无人机集成技术难度较低,国内生产厂家较多,具有成本低、便携性好、集成度高、维护保养简单等优势,缺点是载荷小、巡航时间短。
由于配网系统具有设备众多、设备间距较小、系统结构复杂、经过地区多为城镇人口密集地区等特点,应用于配网线路无人机巡检系统应满足如下要求:(1)经常在人口密集区作业,情况复杂,因此要求配网无人机巡检系统有很高的可靠性,机体尺寸较小、起降方便、坠机风险较低;(2)一般都在公路通达的巡检点附近,因此大都要求目视控制飞行,对于测控距离要求较低,一般2 km距离足够,单次作业时间也不会太长,一般≤30 min;(3)巡检方式多样性,要求能够搭载可见光、红外光观测能力,特殊条件下能够开展紫外、超声波、特高频传感器等多种巡检设备;(4)较强的环境适应性,携带方便,便于作业迅速展开。
因此,综合以上分析建议选择小型无人直升机(以下简称为无人机)开展配网架空线路无人机综合巡检作业。
1.2 无人机结构设计与分析
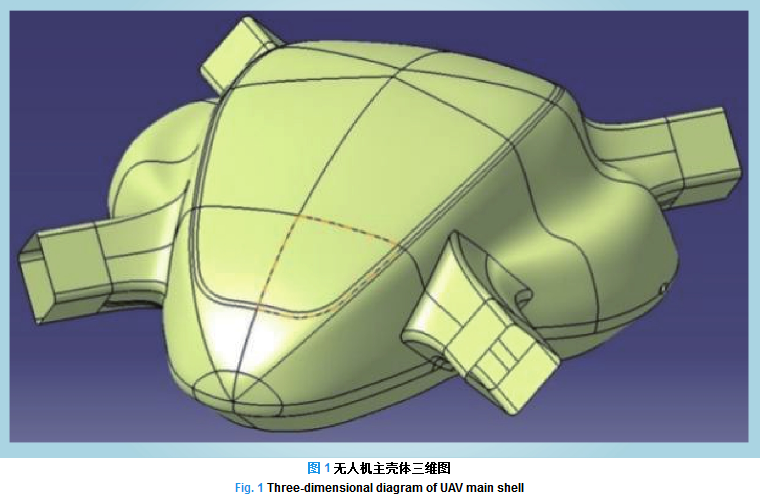
(1)无人机壳体设计。由于配电网无人机巡检工作环境变化较大,并且可能碰到比较恶劣的天气,则需研究无人机壳体的非常规空气动力学特性,且从一定程度上保证无人机的性能、操纵性和稳定性,设计出具有一定流线型的无人机外壳,如图1所示。主壳体具有较好的流线型,在飞行过程中阻力更小,所需动力就更小,在相同电池容量的情况下,续航时间更长。
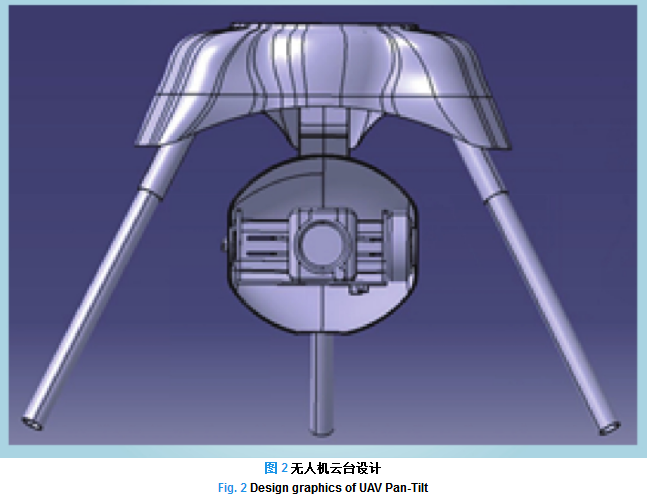
(2)无人机云台设计。电动多旋翼无人机用来搭载任务设备的主要是云台,设计了三轴增稳云台,如图2所示,用于在无人机自主飞行、低空作业的同时,保证数字航空影像的拍摄质量。云台搭载的载荷设计采用插拔式连接方式,安装拆卸方便,便于操作。设计的云台可以实现至少水平和俯仰2个方向的转动性能。
(3)无人机悬臂设计。电动多旋翼无人机的运动和简单结构都依赖于螺旋桨及时的速度改变,以调整力和力矩,设计无人机悬臂如图3所示。
1.3 无人机平台结构仿真分析
悬臂结构是支撑云台、任务设备及整个机架的关键部位,必须保证其良好的结构强度。为验证悬壁结构在悬停工作状态下的变形情况,采用ANSYS有限元软件对悬壁结构进行分析。工作状态应力分布如图4所示,无人机旋翼的流体分析、定速分析分别如图5和图6所示。
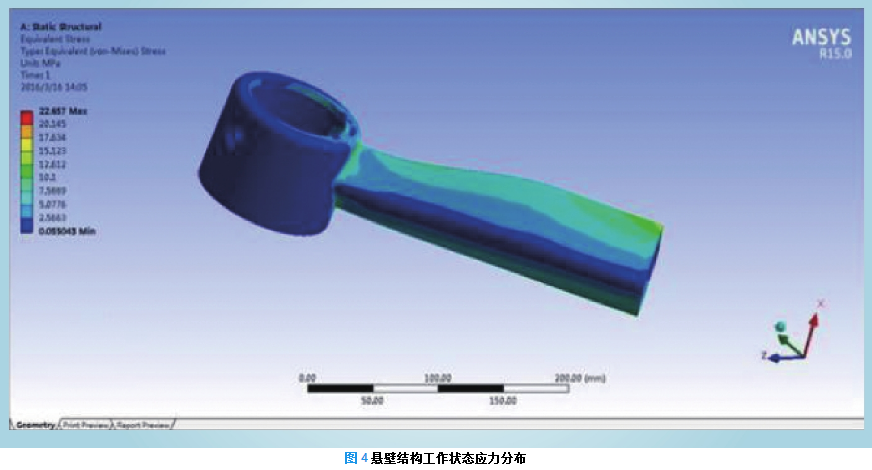
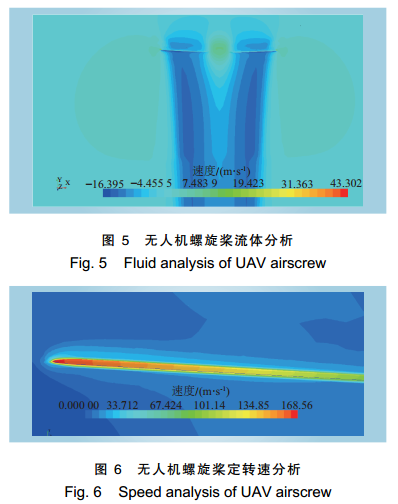
由图4~图6可知:(1)悬臂工作状态时,应力分布均匀,应力最大值为20.125 N/mm,应力值满足空气动力学特性;(2)螺旋桨在工作转速的状态下,流场分布均匀,飞行良好;(3)螺旋桨处于悬停的状态下,桨尖部位空气流速最快,可达到168 m/s左右,桨叶附近空气流动处于湍流状态,桨叶整体飞行运动状况良好。

责任编辑:电朵云