多端柔性直流输电系统直流电压模糊控制策略
原文发表在《电力工程技术》2017年第36卷第2期,欢迎品读。
本文引文信息
刘志江,夏成军,杜兆斌,等. 多端柔性直流输电系统直流电压模糊控制策略[J]. 电力工程技术, 2017, 36(2): 31-37.
LIU Zhijiang, XIA Chengjun, DU Zhaobin.Research of DC Voltage Fuzzy Control Strategy for VSC-MTDC Systems[J]. Electric Power Engineering Technology, 2017, 36(2): 31-37.
多端柔性直流输电系统直流电压模糊控制策略
刘志江, 夏成军, 杜兆斌
1
研究背景
目前基于电压源换流器的高压直流输电系统(voltage source converter based high voltage direct current, VSC-HVDC),由于其可以独立控制有功与无功功率、不存在换相失败、可以作为黑启动电源的众多优点,成为学术界与工程界的焦点 。应用电压源换流器构建的多端直流输电系统能灵活控制潮流,在电压极性不变下改变潮流方向,使得电压源换流器非常适合构建多端柔性直流系统。目前世界上已投运的多端柔性直流输电系统工程有舟山海岛供电工程和南澳接入示范工程。国内外研究设计VSC-MTDC的直流电压控制较少都考虑到直流系统运行时的各种状态所需的控制参数。本文以直流电压斜率控制的原理为依据,考虑了VSC-MTDC受扰动和故障时电气量的变化,基于模糊控制提出一种直流电压变斜率控制策略。
2
电压控制及控制器的设计
2.1 直流电压斜率控制
以图1所示的四端柔性直流输电系统为例,换流站1, 2, 3, 4都采用直流电压斜率控制。当系统所需要的直流功率发生变化时,换流站会根据设定好的P-V曲线来寻找满足系统有功需求的平衡点。采用直流电压固定斜率控制明显有缺点,即对于不同的运行工况适应力较差。系统发生故障或者稳定运行受扰动后,其恢复时间会受斜率的影响。当设置的斜率较大,表现为图2的P-V曲线斜率更大,在系统寻找有功需求平衡点时,直流电压的恢复时间会更短,但是在稳态时,有功功率稍有扰动将会导致直流电压波动比较大,容易造成系统的不稳定。而设置的斜率过小会造成故障后电压恢复缓慢,直流功率波动较大的风险。
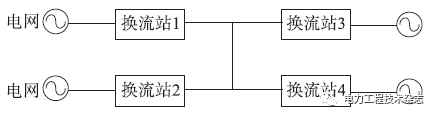
图1 四端柔性直流输电系统拓扑结构
模糊控制优势在于不需要被控对象有详细、定量的数学模型,正好解决了直流电压斜率控制设计的难点,故将其引入控制策略设计中。本文提出一种基于模糊控制的直流电压变斜率控制方法,其能根据系统的运行工况来调整斜率参数,对系统稳定运行和故障后恢复进行有效调控。

图2 直流电压斜率控制器稳态运行工况
2.2 模糊控制器结构
模糊控制不需要像常规控制器一样建立精确的控制模型,只需要将人们手动控制经验用语言加以描述,构成一系列条件语句,即控制规则,再利用模糊理论、模糊语言变量和模糊逻辑推理,模拟人的近似推理与和决策过程。本文设计的直流电压模糊控制策略采用二维控制,因为直流电压斜率控制参数不仅需要直流电压值,还需要直流电压变化率来决定。图3为其二维控制器的模型框图。
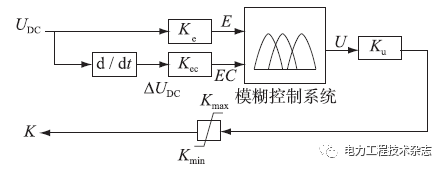
图3 直流电压模糊控制模糊推理过程框图
2.3 模糊控制器参数设计
由于模糊控制器输入的是模糊量,所以必须要对输入进行模糊化。每种运行工况对应的参数不同,因此本文对不同的运行工况分别设置模糊控制器的参数,在实际运行中根据不同的运行工况调用。根据选取的输入量和输出量在模糊集上的基本论域可以得到其各自的隶属函数,由于输入量UDC,ΔUDC和输出量K的模糊集上的基本论域是相同的,所以它们的隶属函数相同,如图4所示。
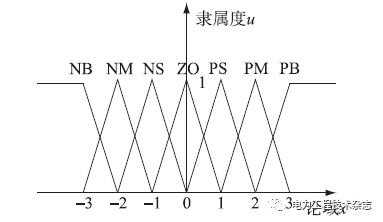
图4 UDC , ΔUDC, K的隶属函数
模糊推理规则是模糊控制参数设计的核心,需要不断试验修正才能达到理想效果。模糊推理规则修正的基本原则就是在较低电压水平和较大的反向变化率时采用较大的斜率控制,以保证系统能更快地调整直流电压和维持一定的直流有功功率。同理当电压水平较高时和正向变化率较大时,也必须采用较大斜率。当电压水平不断向额定值靠近或者电压变化率绝对值减少时,可以考虑将斜率减少,以减少在稳态的扰动时造成不必要的直流电压震荡和尽快恢复有功功率水平。电压在额定电压附近时,并且变化率绝对值不大时,可以采用较低的斜率,保证系统的电压稳定。
3
仿真验证
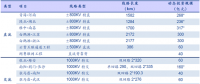
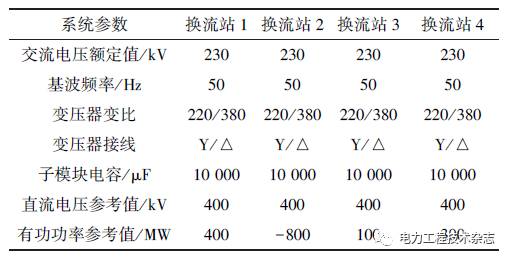
在PSCAD/EMTDC仿真平台上,根据Cigre标准测试模型改造的四端柔性直流输电模型进行仿真验证,如图1所示。各换流站参数设定值如表1所示。仿真采用MATLAB的Fuzzy工具箱编写模糊控制算法,通过PSCAD/EMTDC与MATLAB的接口,实现MATLAB与PSCAD/EMTDC的交互仿真,来验证本文设计的基于模糊控制的直流电压变斜率控制算法。
表1 各换流站参数
3.1 稳态仿真
在t=1.4s时,使换流站2的有功功率输出指令从-800MW减少到-400MW,观察本文设计控制策略在系统稳态运行时接收到功率阶跃信号后的反应,检验系统的抗干扰能力。系统在稳定运行时,设模糊控制输入量UDC的基本论域为[0.925 1.075],ΔUDC的基本论域为[-0.015 0.015],输出量K基本论域为[17],仿真结果如图5所示。
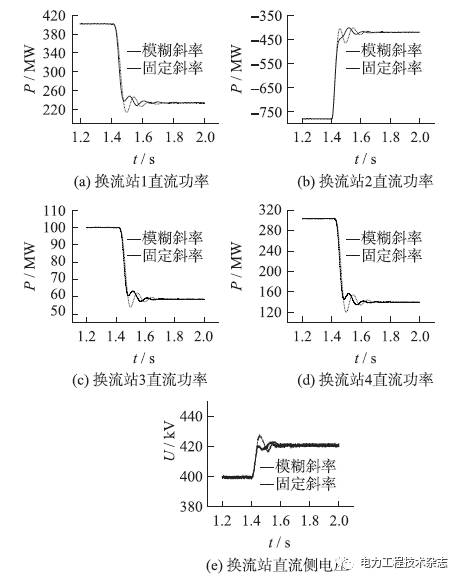
图5 阶跃响应各换流站直流功率和直流电压波形
由图5可知,设置了模糊电压控制的系统中换流站与设置固定斜率电压控制系统中的换流站对比,模糊电压控制系统的直流有功功率输出的跟踪表现良好,恢复曲线较为平滑,恢复时间较快。说明直流电压模糊控制策略相比于固定斜率控制在直流输电系统受阶跃信号扰动的情况下,系统的直流侧功率和直流电压恢复特性较好,其稳态运行性能良好。
3.2 三相接地故障暂态仿真
在t=1.4s时,在换流站2交流侧发生三相短路接地故障,故障持续时间为0.5s,随后故障自动切除。系统在三相接地故障工况时,设模糊控制输入量UDC的基本论域为[0.95 1.1],ΔUDC的基本论域为[-0.06 0.04],输出量K基本论域为[17],仿真结果如图6所示。
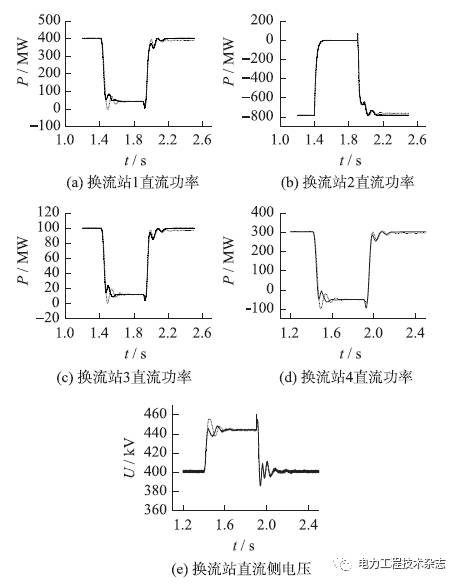
图6 三相接地故障各换流站直流功率和直流电压波形
由图6可知,在1.4s时换流站2交流侧发生三相接地故障时,直流电压模糊控制的系统相比于直流电压固定斜率控制的系统在故障未消除时系统的波动相对较小,直流电压的超调量与故障稳态值相比仅超出1%。且故障消失后的恢复过程中模糊斜率控制的直流电压和直流有功功率恢复曲线更为平滑,不会出现激烈震荡,且恢复时间大大缩短。
4
结束语
(1)本文介绍了直流电压斜率控制策略的直流电压控制原理,并且分析了直流电压固定斜率控制的弊端。
(2)本文提出了基于模糊控制的直流电压变斜率控制的控制策略,其根据系统的有功功率与指令值的差值和有功功率的变化率,通过模糊器、模糊推理、反模糊器后,得到VSC-MTDC所需要的直流电压控制斜率参数。在PSCAD/EMTDC和MATLAB互联的仿真平台进行了仿真验证,仿真结果显示:设计的控制策略具有良好的稳态运行以及暂态运行性能,能有效加速系统在稳态时受扰动后和故障后的恢复速度,并且在恢复时能减少直流有功功率和直流电压的震荡。

责任编辑:售电衡衡
-

权威发布 | 新能源汽车产业顶层设计落地:鼓励“光储充放”,有序推进氢燃料供给体系建设
2020-11-03新能源,汽车,产业,设计 -

中国自主研制的“人造太阳”重力支撑设备正式启运
2020-09-14核聚变,ITER,核电 -

探索 | 既耗能又可供能的数据中心 打造融合型综合能源系统
2020-06-16综合能源服务,新能源消纳,能源互联网
-
新基建助推 数据中心建设将迎爆发期
2020-06-16数据中心,能源互联网,电力新基建 -

泛在电力物联网建设下看电网企业数据变现之路
2019-11-12泛在电力物联网 -

泛在电力物联网建设典型实践案例
2019-10-15泛在电力物联网案例



-
权威发布 | 新能源汽车产业顶层设计落地:鼓励“光储充放”,有序推进氢燃料供给体系建设
2020-11-03新能源,汽车,产业,设计 -
中国自主研制的“人造太阳”重力支撑设备正式启运
2020-09-14核聚变,ITER,核电 -

能源革命和电改政策红利将长期助力储能行业发展
-
探索 | 既耗能又可供能的数据中心 打造融合型综合能源系统
2020-06-16综合能源服务,新能源消纳,能源互联网 -

5G新基建助力智能电网发展
2020-06-125G,智能电网,配电网 -

从智能电网到智能城市