
小型循迹两轮自平衡小车的设计与研究
吴人杰 左涛 刘青松
(嘉兴学院 浙江嘉兴 314001)
摘要: 本文论述一种小型循迹两轮自平衡小车控制系统的设计核实施方案。系统以飞思卡尔半导体公司的16位处理器作为主控芯片,采用陀螺仪与加速度计进行小车直立自平衡检测,激光传感器进行行驶路径检测,利用PWM技术进行电机驱动,借助拨码开关和液晶屏实现对参数的调整与整定。算法方面利用PID控制技术对小车的两个直流电机的转速进行控制,可以实现两轮小车的动态自平衡快速循迹运行。实践表明该设计达到了理想效果。
关键词: 两轮自平衡小车 循迹 动力学 PID控制
两轮自平衡小车和倒立摆都是极不稳定的系统,其动力学方程是一受控对多变量、非线性、严重不稳定,强耦合,时变,参数不确定的高阶方程,在实现小车的稳定控制重点要解决好系统的稳定性、快速性、跟随性等问题。本文基于大学生“恩智浦”杯智能汽车竞赛的要求对两轮自平衡小车的进行了研究和设计,以达到规定的跑道上进行竞速比赛的要求,为此此,小车必须在保证两轮动态自动平衡的前提下尽可能地高速行驶。本文给出了两轮自平衡小车的硬件系统及控制方案、并进行了实践制作,确保了两轮小车的自动直立平衡与循迹高速行驶控制。
1硬件设计
两轮自平衡小车的硬件系统主要由单片机、直流电机驱动模块、倾斜角度检测模块、路径检测模块、速度检测模块、电源模块等组成。
(1)电源模块,自平衡小车控制系统中,不同的电路模块其工作电压各不相同。因此电源模块的设计应能对各模块合理的分配电能与电压调节,以确保各模块的工作电压可靠、稳定。电源模块中包含多个电压变换的模块电路。电池采用DC12V,4000mA·h锂电充电电池,OLED显示采用3.3V电压;单片机、编码器等使用的5V电压;电机驱动使用驱动MOS管电压为12V。采用LM2940芯片来做5V的稳压ASM1117芯片把5V电平降为3.3V。
(2)单片机模块
单片机选择飞思卡尔半导体公司的16位处理器作为微控制器,低功耗、高性能、低引脚数量的微控制器产品、总线可以超频至80MH2,高达240KB的片内在线可编程 FLASH存储器防纠错闪存、定时单元(TM)支持达到8通道、16通道,10位或12位分辨率逐次近似计算法模数转换器8通道脉宽调制模块一组、3个串行外围接口模块,可扩展CAN模块(支持CAN协议2.0A/B).专为支持CAN通信端口复杂的系统需求而设计,微处理器能够满足自平衡小车功能的需要。
(3)角速度与角度检测模块
系统采用陀螺仪和加速度计数据融合的方式获取小车角度倾斜信息。同时通过陀螺仪测得小车倾斜角速度,将角速度信号在时间上积分后便可以得到小车的直立倾斜角度。陀螺仪测量具有噪声很小,稳定性好的特点。但是,如果角速度信号存在微小的误差,经过积分后就会形成累积误差,最终无法得到正确的角度,为此,为克服累积误差的影响,本系统采用加速度计传感器得到对陀螺仪进行角度信息的校正、角度漂移的纠正。将重力加速度计和陀螺仪的角度信息进行数据互补融合以获的小车的角速度和倾斜角,从而使积分后的角度逐步跟踪到准确的角度值。
(4)赛道检测模块
为获得赛道更多的路面信息与更远的距离,必须采用高性能的路面检测传感器。激光传感器具有灵敏度高、精确性高、稳定性强等优势,定向性较好,周围光线对其几乎没有影响。本系统在车子顶部安装激光传感器,这样可以获得更好的接收角度核更远的前瞻性。激光的驱动使用74HC573锁存器进行,在锁存器的使能端加上一个由555定定时器产生180kHz的调制信号,满足激光接收管接受到某一个固定范围波长的光波。在小车顶上左、右对称安装有10个激光发射管和5个接收管。
(6)电机驱动模块
电机驱动模块采用全桥驱动电路。驱动芯片为英飞凌BTS7960,通态电阻典型值为16mΩ,驱动电流可达43A,功耗小;集成的驱动lc具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能。两片BTS7960芯片构成全桥驱动电路,通过两路PWM信号控制电机的正反转和速度。该电路驱动效率较高,输出功率能满足对小车直立控制的要求,并且电路结构简单,控制方便,易于搭建。
2控制方案及实现
小车的运动控制可分解为三个基本控制任务:
(1)控制直立平衡:通过测量小车的角度偏移和角速度,控制小车的加速度就可以保持车模直立平衡状态。
(2)控制小车速度:通过控制电机的转速控制车轮速度,实现车模速度控制。
(3)控制小车方向:通过控制两个电机的正反转、转动差速,实现车模前行、倒退及转向控制。在小车控制中的直立、速度和方向控制三个环节中,可以使用比例微分(PD)或比例积分微分(PID)进行控制。中断服务程序完成小车的角度、速度和方向控制的周期调用,主程序和中断程序之间用全局变量进行数据通信。
自平衡小车的控制通过单片机编程实现,单片机实现的主要功能有:
(1)总体的程序运行流程控制:初始化、小车的启动和结束;
(2)系统的界面:借助拨码开关与液晶屏进行状态显示、参数的设定;
(3)小车倾斜角度、路径、速度检测与计算;
(4)小车的动态平衡控制:直立控制、速度控制、方向控制;(5)电机的PWM输出。根据前面的直立控制、速度控制和方向控制函数计算的控制量进行线性加权叠加,就可分别得到左右两个电机的输出电压实现两个直流电机的转速控制,确保小车的动态自平衡快速寻迹运行。
3结语
本文针对基于智能车竞赛的自平衡小车的设计问题进行了研究,给出了自平衡小车的硬件系统和单片机控制实现方案。实验表明,本方案对光线的抗干扰性强,电机驱动性能良好,小车能够沿着赛道行进,车身保持动态自动平衡,行驶平稳快速。
参考文献:
[1]刘伟基于MC9S12XS128微控制器的智能车硬件设计[J].电子设计工程,2010,18(1):102-104.
[2]王晓宇,闫继宏,臧希等.两轮自平衡机器人多传感器数据融合方法研究[J].传感技术学报,2007,20(3):668-672[3]薛凡,孙京诰,严怀成两轮平衡车的建模与控制研究[J],化工自动化及仪表,2014,41(11):67-71+114.
[4]朱年华.两轮自平衡电动车控制系统设计与研究[D],华东交通大学,2016
基金项目: 本文得到嘉兴学院大学生创新项目资助
作者简介:
吴人杰,嘉兴学院电气工程及其自动化专业学生,研究方向为智能控制。

责任编辑:电力交易小郭
-

现货模式下谷电用户价值再评估
2020-10-10电力现货市场,电力交易,电力用户 -

PPT | 高校综合能源服务有哪些解决方案?
2020-10-09综合能源服务,清洁供热,多能互补 -

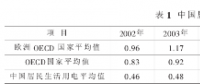
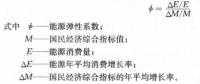
深度文章 | “十三五”以来电力消费增长原因分析及中长期展望
2020-09-27电力需求,用电量,全社会用电量
-
PPT | 高校综合能源服务有哪些解决方案?
2020-10-09综合能源服务,清洁供热,多能互补 -
深度文章 | “十三五”以来电力消费增长原因分析及中长期展望
2020-09-27电力需求,用电量,全社会用电量 -
我国电力改革涉及的电价问题


-

贵州职称论文发表选择泛亚,论文发表有保障
2019-02-20贵州职称论文发表 -

《电力设备管理》杂志首届全国电力工业 特约专家征文
2019-01-05电力设备管理杂志 -

国内首座蜂窝型集束煤仓管理创新与实践
-

人力资源和社会保障部:电线电缆制造工国家职业技能标准
-
人力资源和社会保障部:变压器互感器制造工国家职业技能标准
-
《低压微电网并网一体化装置技术规范》T/CEC 150
2019-01-02低压微电网技术规范
-
现货模式下谷电用户价值再评估
2020-10-10电力现货市场,电力交易,电力用户 -

建议收藏 | 中国电价全景图
2020-09-16电价,全景图,电力 -

一张图读懂我国销售电价附加
2020-03-05销售电价附加
-
电气工程学科排行榜发布!华北电力大学排名第二
-

国家电网61家单位招聘毕业生
2019-03-12国家电网招聘毕业生 -

《电力设备管理》杂志读者俱乐部会员招募
2018-10-16电力设备管理杂志
